 3 weeks ago
11
3 weeks ago
11
While the industry obsesses over robots that are bigger, more powerful, and more intelligent — often powered by GPUs consuming hundreds of watts — the team led by Vivienne Sze and Sertac Karaman made the opposite, and to my mind far more interesting, choice: making real-time 3D mapping practical on devices that run on the power of a single LED bulb.
This isn't an incremental improvement. It's a paradigm shift.
The Hidden Problem of Traditional 3D Mapping
Building detailed 3D maps has always been a resource-hungry operation. Conventional systems must:
- Capture and store entire depth images
- Process all 3D pixels (voxels) multiple times
- Archive rigid, cube-shaped representations of the environment
The result? Bulky hardware, energy consumption unsustainable for wearables or lightweight drones, and latencies that make real-time navigation in tight, dynamic spaces impossible.
MIT's Solution: Three Interconnected Levers of Innovation
1. Gaussians Instead of Voxels
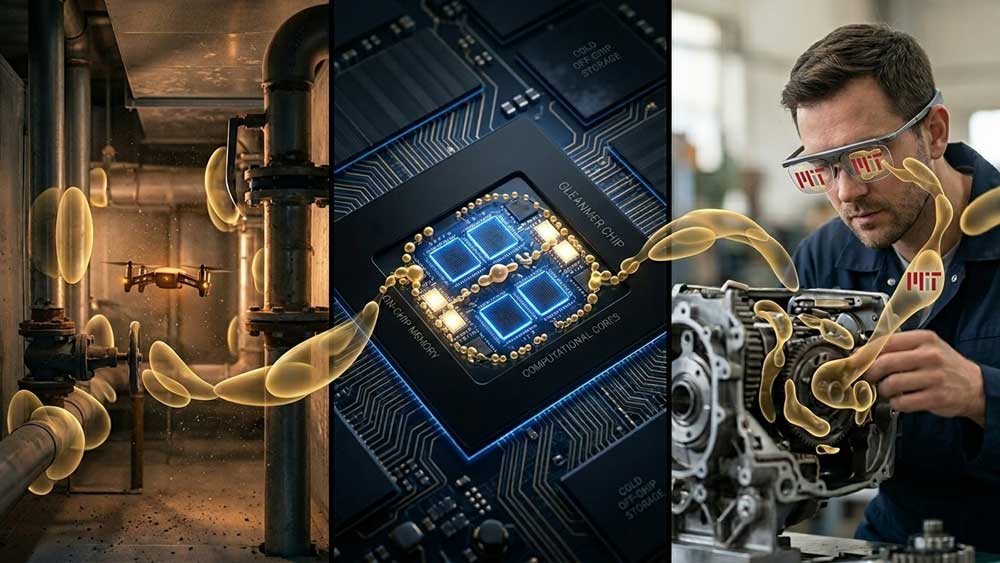
Rather than representing obstacles with rigid cubes (voxels), Gleanmer uses adaptive ellipsoids called Gaussians. The size, shape, and thickness of these ellipsoids can be smoothly adjusted to match the curved geometry of real-world objects.
Why this is revolutionary: a single elongated Gaussian can represent a region that would require dozens or hundreds of voxels. Occupied surfaces and free space are captured in an exponentially more compact form. This isn't just compression — it's a more elegant mathematical representation of the physical world.
2. Single-Pass Processing with Minimal Memory
The GMMap (Gaussian Mapping) algorithm developed by the lab introduces a simple but powerful assumption: spatially nearby pixels likely belong to the same Gaussian. So instead of comparing every pixel to every other pixel in the 3D image (a quadratically expensive operation), the algorithm only compares neighboring pixels.The practical result: depth images are processed in a single pass, after which they can be discarded. The chip never needs to store an entire image at once. As co-author Peter Zhi Xuan Li explains: "At any point in time, we only need to store a few pixels in memory".
3. On-Chip Fusion Without Revisiting Raw Data
As a robot moves, it sees the same objects from different angles. This generates overlapping Gaussians that, if left to accumulate, would bloat the map beyond the capacity of an edge device.The classical solution would require reprocessing the original pixels to merge representations. The MIT team invented a technique that fuses overlapping Gaussians directly, without ever going back to raw pixels. Since Gaussians are orders of magnitude more compact than pixels, memory and power requirements collapse.
Co-Design as Philosophy, Not Optimization
Here's the real lesson. Vivienne Sze didn't take an existing algorithm and ask a hardware team to accelerate it. And she didn't design a generic chip and then search for an algorithm that would run well on it.
She co-designed both:
The intrinsic compactness of Gaussians enables a reduced on-chip memory architecture. The reduced memory architecture makes Gaussian mapping practical in real-time. The algorithm assumes nearby pixels are correlated because the hardware can exploit this spatial locality. The hardware keeps active Gaussians in fast memory because the algorithm guarantees they are compact enough.
It's a closed loop of mutual advantages, not a chain of trade-offs.
The researchers exploit this principle to design a chip that keeps the Gaussians it is actively working on within small, fast on-chip memory right beside the computational units. The Gaussians the robot needs to work on next are waiting in the on-chip memory units, so they don't need to be fetched from more distant, power-hungry, off-chip storage.
As co-author Zih-Sing Fu explains: "By having a dedicated memory that just stores the objects you've seen in the previous few frames, you can access the data much more efficiently."
The Numbers That Matter
- 6 milliwatts of power consumption — a tiny fraction of existing systems
- 2.5% of the energy required by the best previous chip for map construction
- 20% of the energy normally needed to plan a safe trajectory, thanks to reusing compact Gaussians along the path
Applications Far Beyond Drones in Ducts
The MIT article mentions immediate applications like drones inspecting HVAC systems for gas leaks, but the potential is much broader:
Lightweight, Extended-Wear AR AR headsets that can be worn for hours, not minutes, for educational medical simulations, complex repairs, or detailed assembly work. The main barrier to wearable AR isn't graphics — it's battery life. Gleanmer changes the equation.
Inspection Robotics in Hazardous Environments Confined spaces, industrial structures, underwater pipelines, or contaminated areas where a lightweight, low-power robot is the only practical option.
Edge AI Reasoning Over Complex Schematics The researchers are already exploring using Gaussians to represent technical schematics. This could enable AI systems to reason over complex blueprints with the same efficiency that Gleanmer brings to physical space.
Distributed Intelligent Sensor Networks Networks of micro-devices that map and monitor environments in real-time without needing cloud connectivity or bulky batteries.
The Broader Context: Efficiency vs. Brute Force
There's a tendency in AI and robotics to measure progress in parameters, FLOPS, and watts. Bigger is more powerful, more powerful is more "intelligent".
Gleanmer represents an alternative, and I believe necessary, direction: intelligence as efficiency, not brute force. You don't need a 500-watt GPU to map a room. You need the right algorithm, the right hardware, and the vision to design them as a single system.
Sertac Karaman puts it clearly: "Real-time 3D mapping has been the missing piece for small autonomous systems. A drone inspecting a pipeline or a pair of AR glasses navigating a room both need to understand the space around them — instantly, continuously, and at almost no power cost. Gleanmer makes that possible for the first time in a chip you can hold between your fingers".
My Final Reflection
This work is funded by MIT-MathWorks Fellowship, Amazon, NSF, and Intel. It's not an isolated academic project — it's a signal of where the industry is heading.
For anyone working in robotics, AR, edge AI, or technological innovation more broadly, the lesson is clear: the next leap won't come from more compute, but from smarter compute. The question isn't "how much power can we put on this device?", but "how much intelligence can we extract from every milliwatt?"
Gleanmer is MIT's answer to that question. And the answer is: far more than we thought.
What do you think? Does the future of robotics run through energy efficiency, or will we continue chasing brute force? And which Gleanmer application do you see as most transformative in the near term?


